Sol 1131 - end-of-drive 4-tile processed NavCam at site 91-1928 (October 27, 2024
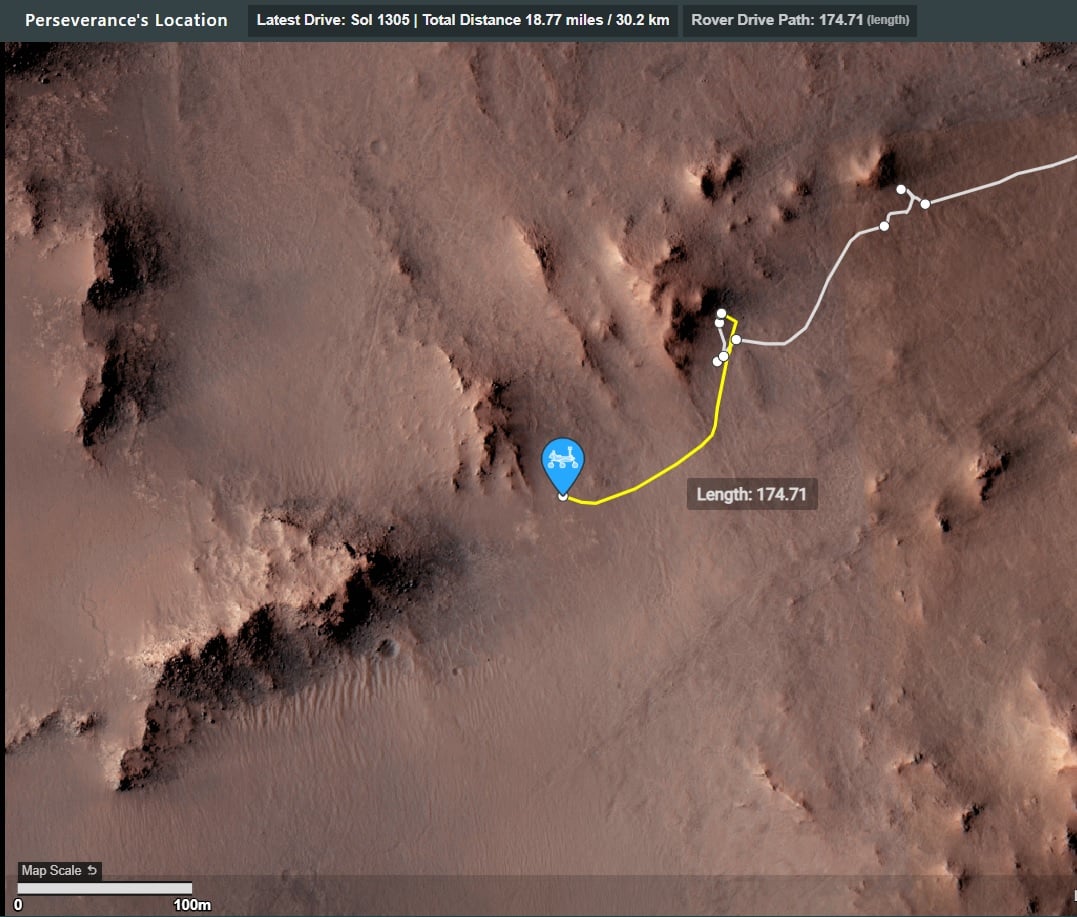
Still waiting for the official data, but it looks to be close to 50 meters Northeast of its position on sol 1308
Sol 1131 - end-of-drive 4-tile processed NavCam at site 91-1928 (October 27, 2024
Still waiting for the official data, but it looks to be close to 50 meters Northeast of its position on sol 1308
R-MastCam-Z at full zoom (110mm) images a craggy rock face of Pico Turquino
The distance the rock face from the rover is approximately to 130 meters / 427 feet
Pico Turquino is one of the science waypoints on the notional path to the summit of the crater rim.
The rim was of Jezero crater is seen in the background (approximately 1.4 km / 0.87 miles from the rover.
The difference between the current elevation of the rover and the crater rim at that location is approximately 250 meters / 820 feet
The upper part of the Pico Turquino butte stands about 25 meters / 82 feet above the base of its scree slope
Perseverance rover acquired this image using its Right Mastcam-Z camera. Mastcam-Z is a pair of cameras located high on the rover's mast.
This image was acquired on October 25, 2024 (Sol 1309) at the local mean solar time of 09:33:48.
Processed using PhotoScape
Image Credit: NASA/JPL-Caltech/ASU/MSSS

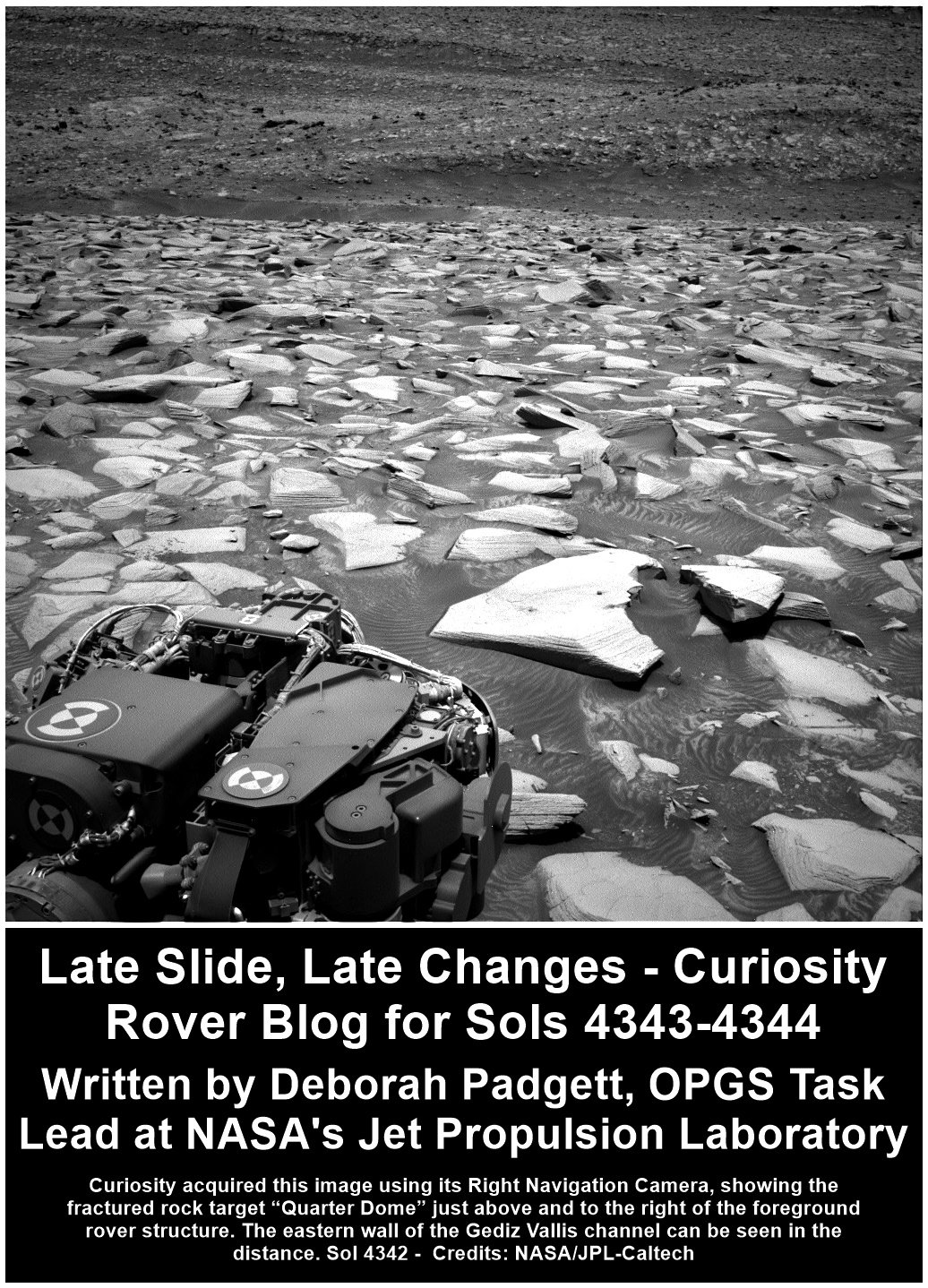
Late Slide, Late Changes - Curiosity Rover Blog for Sols 4343-4344. Earth planning date: Wednesday October 23, 2024
Curiosity is driving along the western edge of the Gediz Vallis channel, heading for a good vantage point before turning westward and leaving the channel behind to explore the canyons beyond. The contact science for “Chuck Pass” on sol 4341 and backwards 30-meter drive (about 98 feet) on sol 4342 completed successfully.
This morning, planning started two hours later than usual. At the end of each rover plan is a baton pass involving Curiosity finishing its activities from the previous plan, transmitting its acquired data to a Mars-orbiting relay satellite passing over Gale Crater, and having that satellite send this data to the Deep Space Network on Earth. This dataset is crucial to our team’s decisions on Curiosity’s next activities. It is not always feasible for us to get our critical data transmitted before the preferred planning shift start time of 8 a.m. This leads to what we call a “late slide,” when our planning days start and end later than usual.
Today’s shift began as the “decisional downlink” arrived just before 10 a.m. PDT. The science planning team jumped into action as the data rolled in, completed plans for two sols of science activities, then had to quickly change those plans completely as the Rover Planners perusing new images from the decisional downlink determined that the position of Curiosity’s wheels after the drive would not support deployment of its arm, eliminating the planned use of APXS, MAHLI, and the DRT on interesting rocks in the workspace. However, the science team was able to pivot quickly and create an ambitious two-sol science plan for Curiosity with the other science instruments.
On sols 4343-4344, Curiosity will focus on examining blocks of finely layered or “laminated” bedrocks in its workspace. The “Backbone Creek” target, which has an erosion resistant vertical fin of dark material, will be zapped by the ChemCam laser to determine composition, and photographed by Mastcam. “Backbone Creek” is named for a stream in the western foothills of the Sierra Nevada of California flowing through a Natural Research Area established to protect the endangered Carpenteria californica woodland shrub. Curiosity is currently in the “Bishop” quadrangle on our map, so all targets in this area of Mount Sharp are named after places in the Sierra Nevada and Owens Valley of California. A neighboring target rock, “Fantail Lake,” which has horizontal fins among its layers, will also be imaged at high resolution by Mastcam. This target name honors a large alpine lake at nearly 10,000 feet just beyond the eastern boundary of Yosemite National Park. A fractured rock dubbed “Quarter Dome,” after a pair of Yosemite National Park’s spectacular granitic domes along the incomparable wall of Tenaya Canyon between Half Dome and Cloud’s Rest, will be the subject of mosaic images for both Mastcam and ChemCam RMI to obtain exquisite detail on delicate layers across its broken surface (see image). The ChemCam RMI telescopic camera will look at light toned rocks on the upper Gediz Vallis ridge. Curiosity will also do a Navcam dust devil movie and mosaic of dust on the rover deck, then determine dust opacity in the atmosphere using Mastcam.
Following this science block, Curiosity will drive about 18 meters (about 59 feet) and perform post-drive imaging, including a MARDI image of the ground under the rover. On sol 4344, the rover will do Navcam large dust devil and deck surveys. It will then use both Navcam and ChemCam for an AEGIS observation of the new location. Presuming that Curiosity ends the drive on more solid footing than today’s location, it will do contact science during the weekend plan, then drive on towards the next fascinating waypoint on our journey towards the western canyons of Mount Sharp.
Written by Deborah Padgett, OPGS Task Lead at NASA's Jet Propulsion Laboratory
Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4343-4344-late-slide-late-changes/
These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public.
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Image credits: NASA/JPL-Caltech
I've not had the pleasure of visiting any of those analog locations, but I have thoroughly enjoyed visiting a few of the remote deserts in the middle East in my working years. Granted I was there for work, but did get to explore / enjoy the places during downtime :) I'm with you regarding the need to be sure of the environment before we put boots on the Martian surface, but that could have been done years ago, even decades ago. The 60's was an amazing time to witness what was being achieved. Hopefully there will be a similar period in the future. Time will tell.
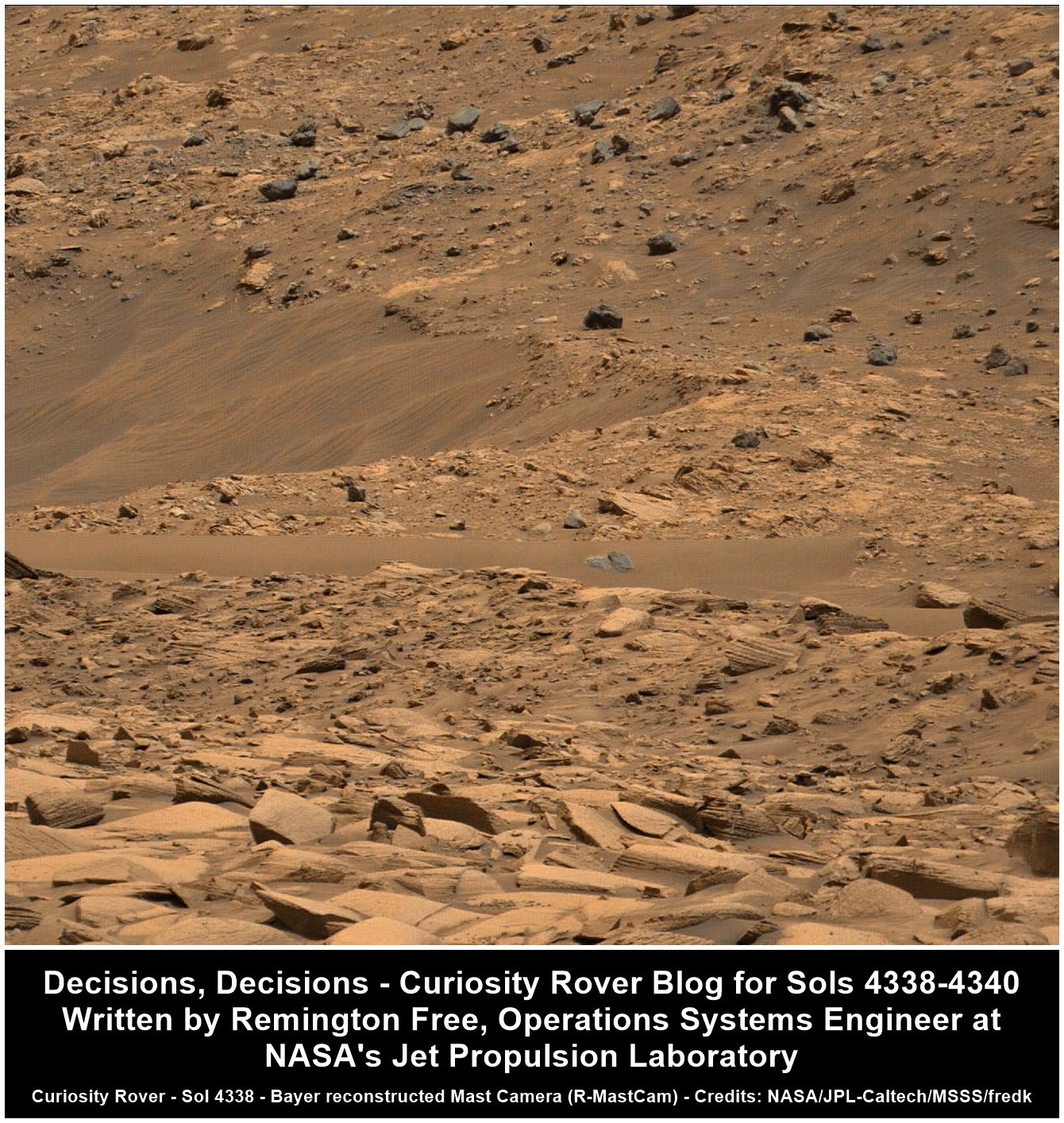
Decisions, Decisions - Curiosity Rover Blog for Sols 4338-4340. Earth planning date: Friday October 18, 2024
On sol 4338, we have a science block planned as well as some arm activities. Our science activities include a ChemCam observation of “Donkey Lake.” This is a bedrock target with exposed laminations. In geology, lamination is a sequence of small-scale, embedded fine layers of sedimentary rock. Next, we will do an RMI mosaic as well as Mastcam imaging on “Fascination Turret" to document the boulder configuration for study of both debris flow and rock deposition processes. We’ll also do a Navcam dust devil survey to study the Martian atmosphere, before moving into our arm backbones. We’ll perform a DRT and APXS on several bedrock targets with exposed layering. An exciting sol for geology!
Sol 4339 presented some interesting decisions for our planning team to make. We started out with a science block. This included a ChemCam LIBS analysis on a soil target with interesting color differences. We also performed an RMI mosaic and Mastcam imaging of “Whitebark Pass” to study possible surface erosion. After this science block, we planned to do a long traverse, which is where planning got a bit tricky.
The drive was a bit complicated to plan. The terrain had lots of rocks which ultimately prevented us from planning a guarded drive (i.e., a drive using auto navigation), which would have extended the drive length. There are occlusion considerations — we always want to end the drive in a good orientation for a communications link. When evaluating our end of drive, there are potential configurations where the line of sight for communications would be blocked, either due to terrain or due to objects on the rover deck. Here, because of the many and large size of rocks in our terrain, we were not confident that auto-navigation would not fault and position us in a bad orientation for our next communications window. With this risk, we decided to take a shorter drive with a sure unoccluded end-of-drive orientation. As planned, our drive will reach about 27 meters (almost 89 feet), whereas a guarded drive if the terrain was better might have yielded around 50 meters (about 164 feet). After the drive, we’ll take some imaging and do a Mastcam survey to observe soils along the traverse path.
On sol 4340, we planned for two science blocks. The first included a ChemCam AEGIS activity — this will allow the rover to examine its surroundings and pick out some interesting targets for analysis. We will also perform a Navcam dust devil movie to capture any interesting dust activities in the atmosphere. Next, we’ll move into our second science block, which is focused on environmental science. We’ll first take Mastcam tau observations, which will allow us to study and measure the optical depth of the atmosphere, which is often used as a proxy to understand the dust in the atmosphere. We’ll also do some early morning remote science, including Navcam cloud movies at zenith and at suprahorizon.
Written by Remington Free, Operations Systems Engineer at NASA's Jet Propulsion Laboratory
Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4338-4340-decisions-decisions/
These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public.
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Image credits: NASA/JPL-Caltech/MSSS/fredk
Are we really passing up all those tasty-textured boulders on the hill??
It's certainly looking that way. I've wanted boots on the ground since the Apollo missions were completed. Certainly not going to happen in what's left before they nail down my pine lid. That's for the younger one's to experience...
'Pico Torquino' is ~200 meters WSW, it's one of the science waypoints identified by JPL in the crater rim campaign.
Image credits: HRSC: ESA/DLR/FU-BERLIN, CC BY-SA 3.0 IGO CTX: NASA/JPL-Caltech/MSSS HiRISE: NASA/JPL/University of Arizona
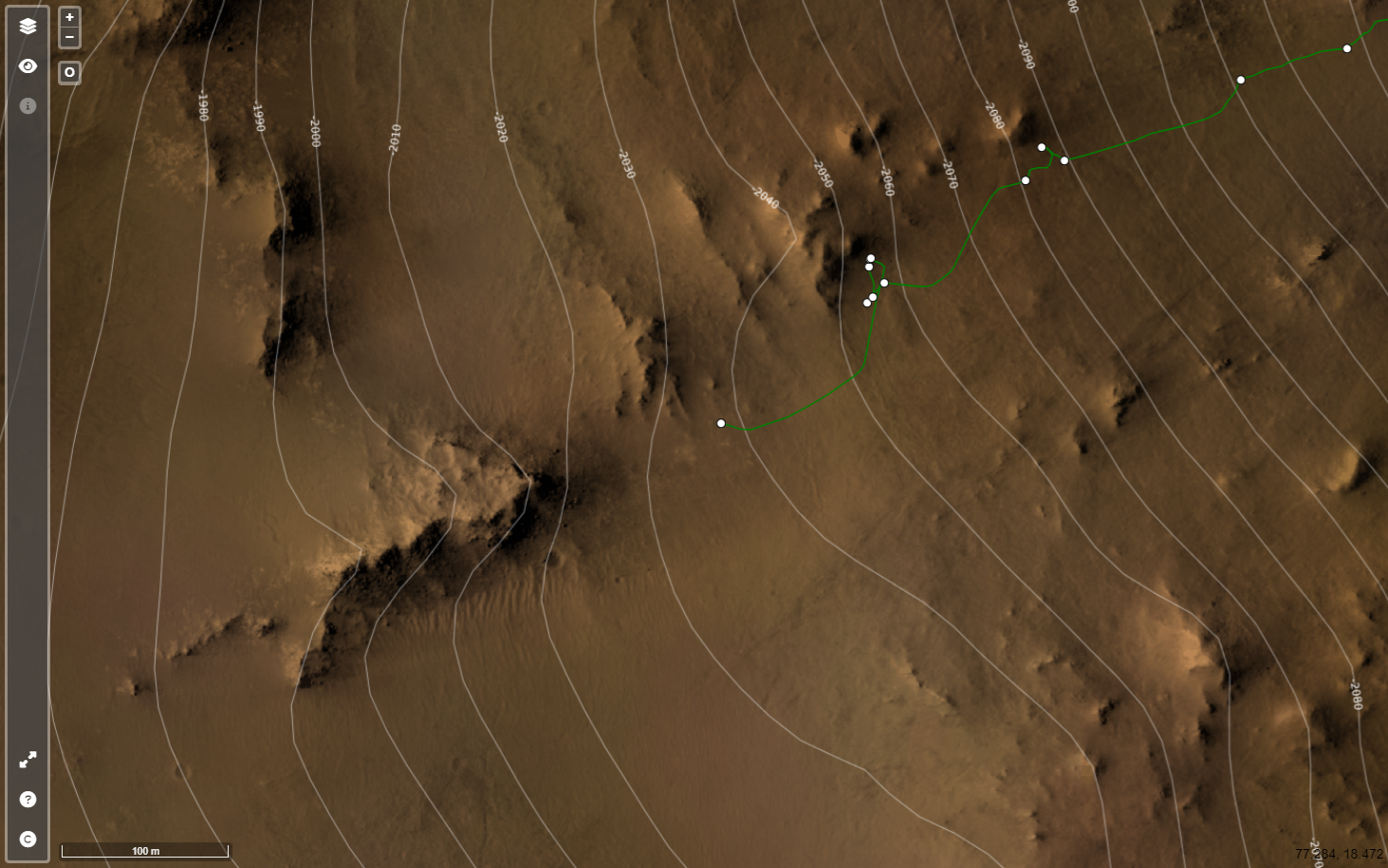
Screen capture from JPL's online map
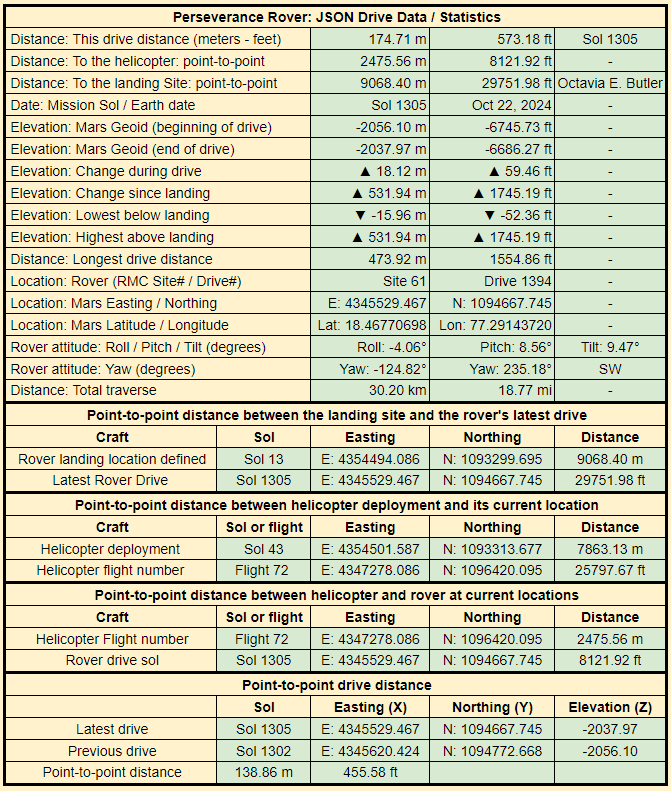
Data from JPL's JSON feeds
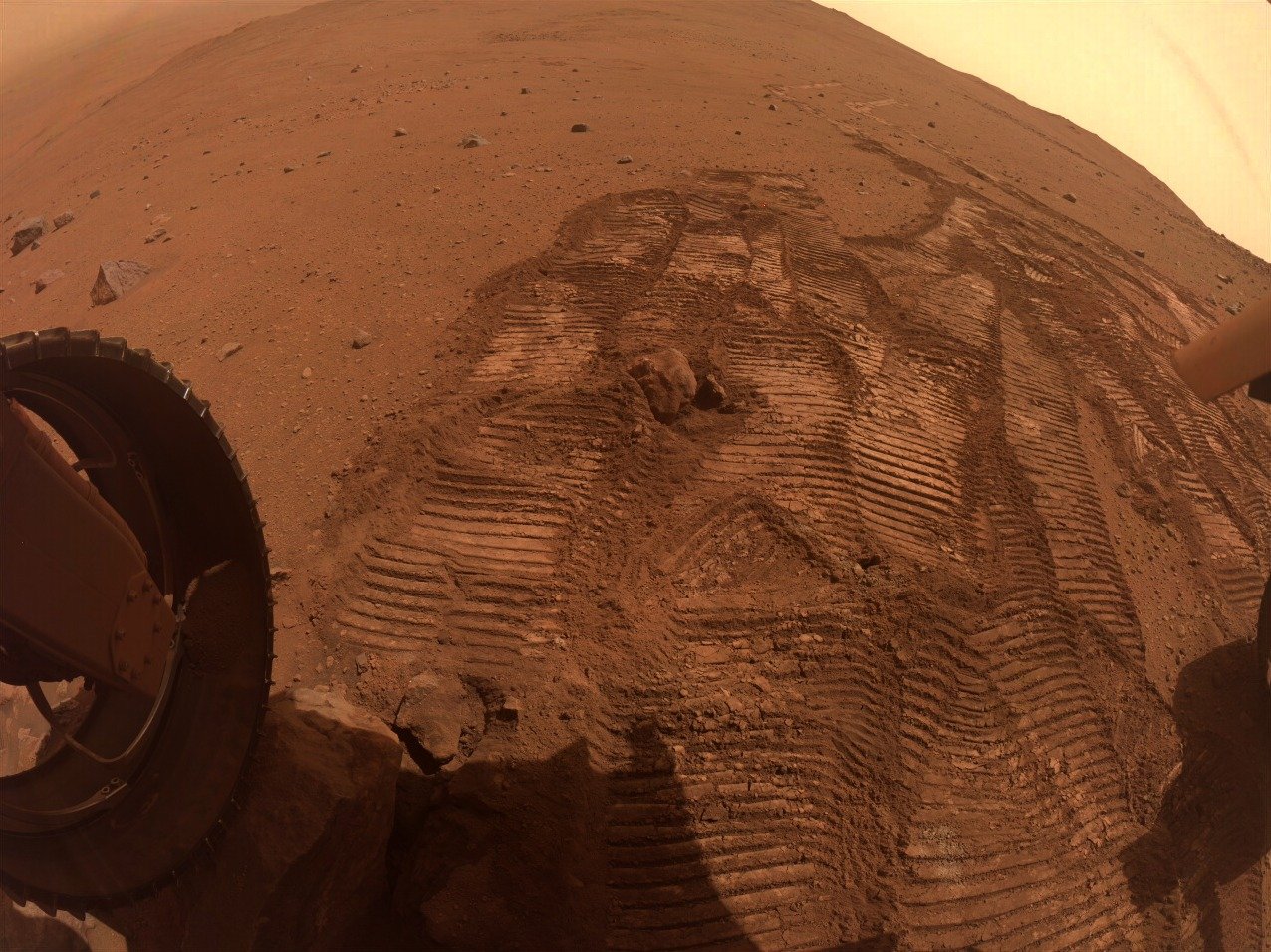
Drive Direction ~WSW 4-tile end-of-drive NavCam NASA/JPL-Caltech

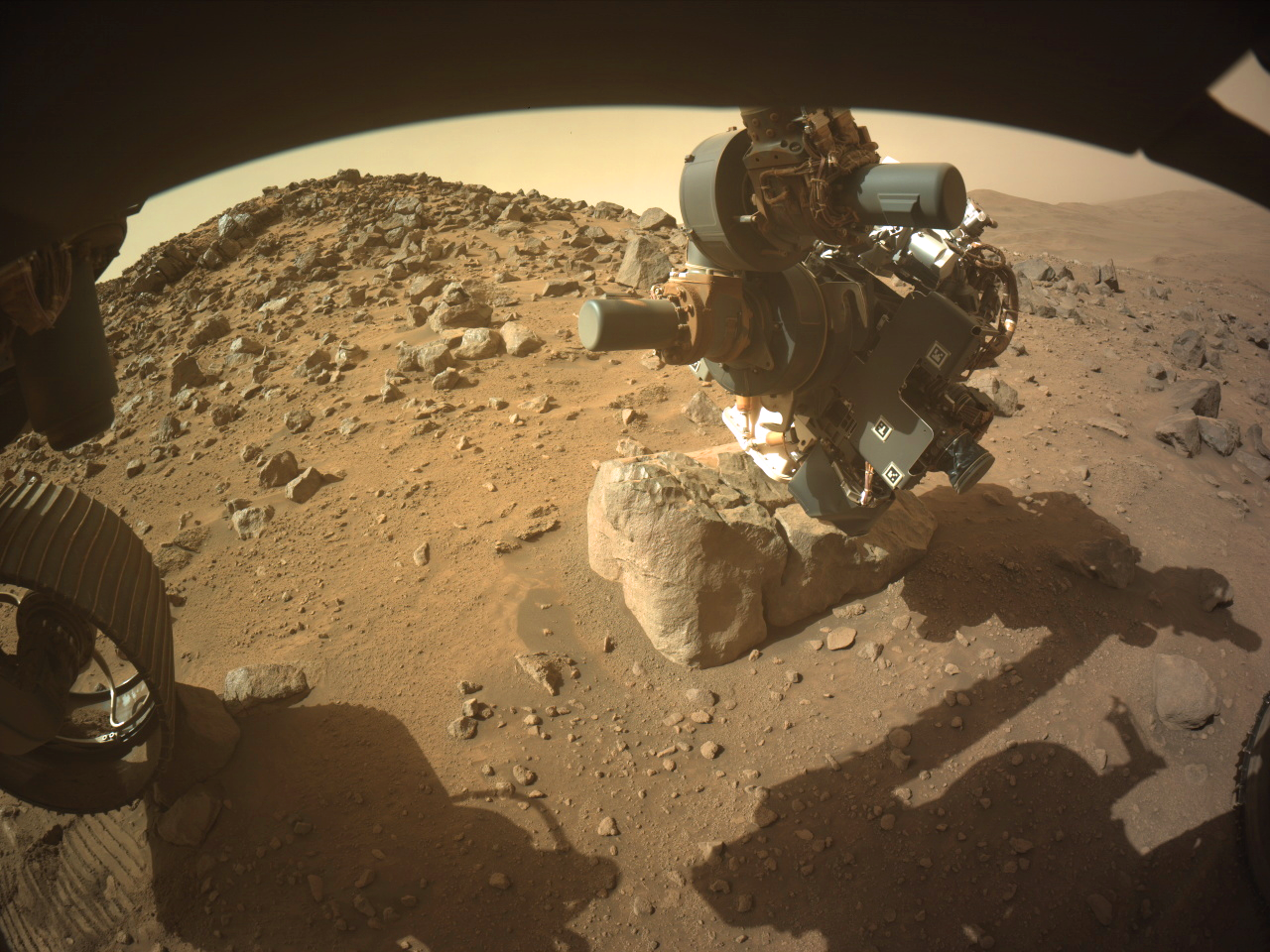
Despite one of the front wheels and the diagonally opposite rear wheel being perched on rocks they commanded the robotic arm to acquire close up images (WATSON) of the surface of this small boulder.
They were probably confident that the rover would not slip. In the past, the use of the arm to obtain close-ups using the turret mounted cameras have meant a delay as the rover was repositioned to firm ground, as s slip could damage the rover.
This image is from the front-left HazCam
NASA/JPL-Caltech
It looks like it has been polished by eons of wind blown dust particles
Nicely done, I preferred the older JPL mission traverse maps as used on the early years of the MSL mission, as each waypoint and some of the larger features were labeled. I can only assume that the new style interactive maps can not cope with that level of detail.
Look close - You'll see one of the rear wheels perched on a rock.
They will likely not perform any arm work in this state.
NASA/JPL-Caltech/James Sorenson
Apologies for the stitching errors (upper right of the slope) MS-ICE didn't do a great job this time, and I missed it before sharing
You mean “notional path to the SSW”, Paul, no?
They chose North on 1301 :) see https://mars.nasa.gov/maps/location/?mission=M20
Not quite the place I was thinking of, but we have a good selection of targets for arm work :)
My bad, SSW... Fat fingers 😮
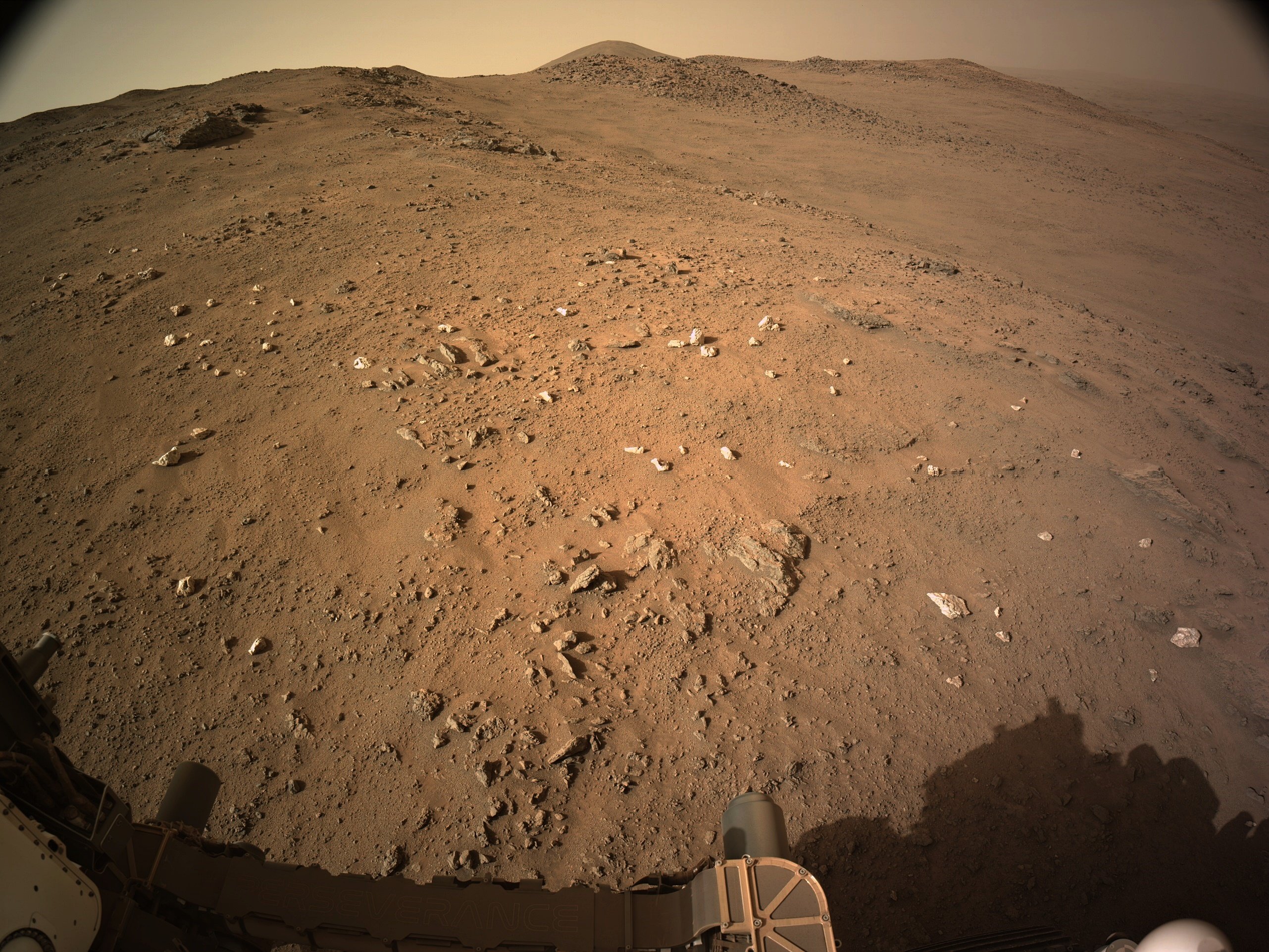
This is a 4-tile end-of-drive NavCam. The rear of the rover is pointing NE. Assembled in MS-ICE - Credits: NASA/JPL-Caltech
The rover is currently driving up the rim wall of Jezero crater. The rim wall was created by a huge impact in Mars early history. So we could be looking at some of the oldest rocks that were uplifted during the impact. I'm clearly not a geologist, so it will be interesting to see the results of the investigations of the rocks in this region by the science team.
His video titles are often clickbait, but on the whole I enjoy his content.
ICYMI - They just drove downslope to a field full of small white (light toned) rocks :)